Jeff's Navigator (JNAV)
Project Completion: On hold
This project is on hold while I work on other endeavors. Most of the informational material has not yet been generated.
Purpose:
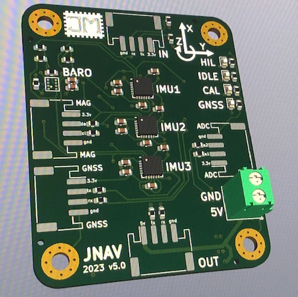
The purpose of this project is to develop an independent navigational computer that can be used for various other future drone/robotic related projects.
It is still in the prototyping phase. A simulation of the MVP software has been generated and is shown on this page for interested parties.
The EKF works and is able to blend simulated IMU and GNSS signals into a position-velocity-quaternion navigational state vector. It is also fitted with input signal procesing (ISP), a state machine (SEQUENCER), and tunable parameter software with CRC check protection. I'm excited to one day return to this project!
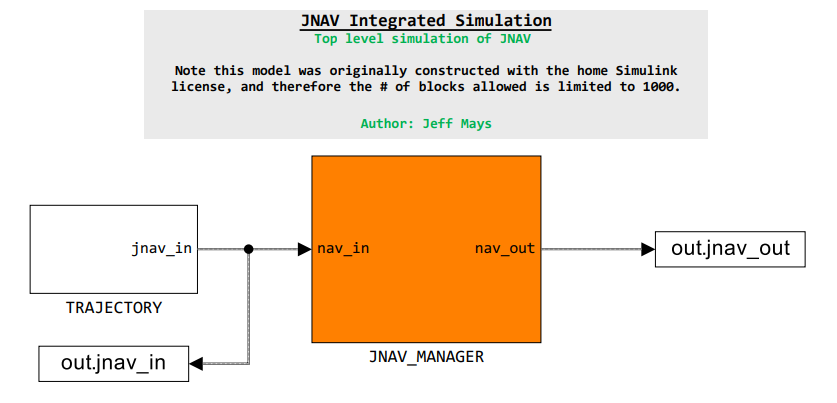
Top Level JNAV Manager Simulation:
The top level simulation simulink file is shown below. Via the initialization scripting, I am able to input different trajectories and their respective sensor data and record the IO of the software.
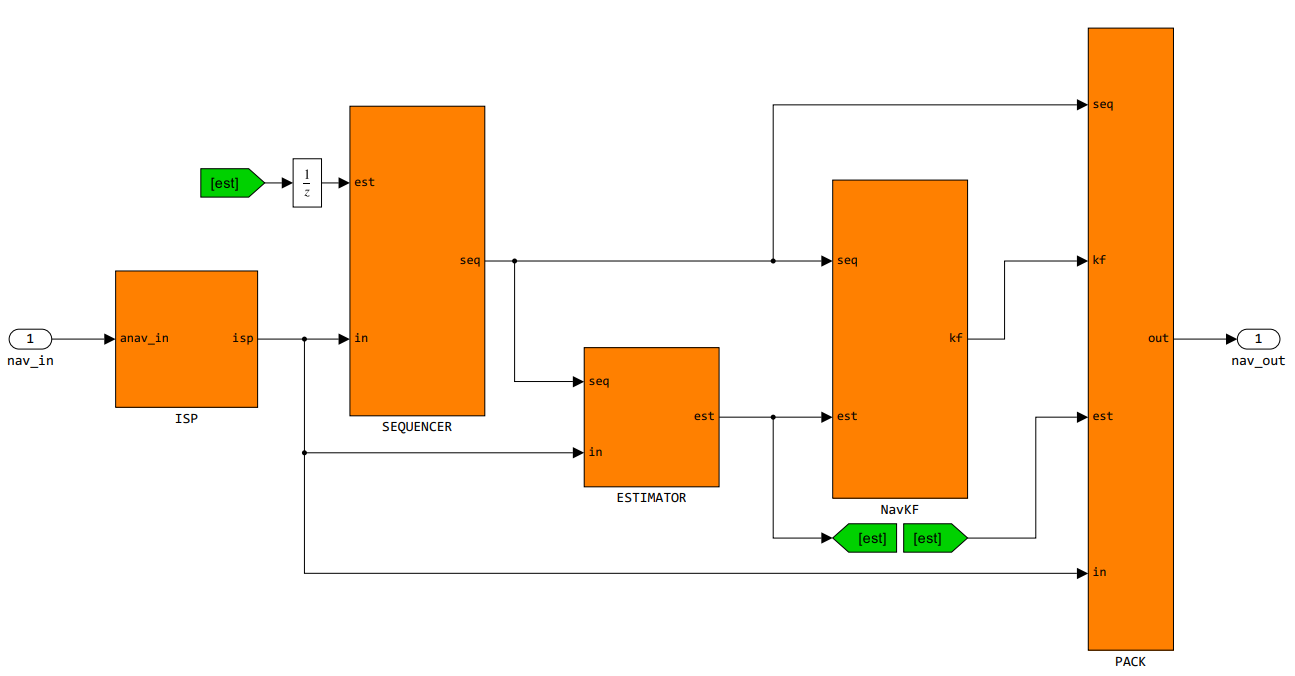
Top Level JNAV Manager Software:
The top level of the JNAV software is shown below. In it holds different software capabilities that allow the software to assess inputs (ISP), sequence the software for calibration, alignment, etc., perform parameter tuning, perform calibration and statusing of the different sensors (such as the IMUs, GNSS receiver, etc), and also run an Error state Kalman Filter (EKF).
Top Level EKF Software:
The top level of the EKF is shown below. It shows how the EKF state vector, xhat, is pulled and extracted into the common NED reference frame.
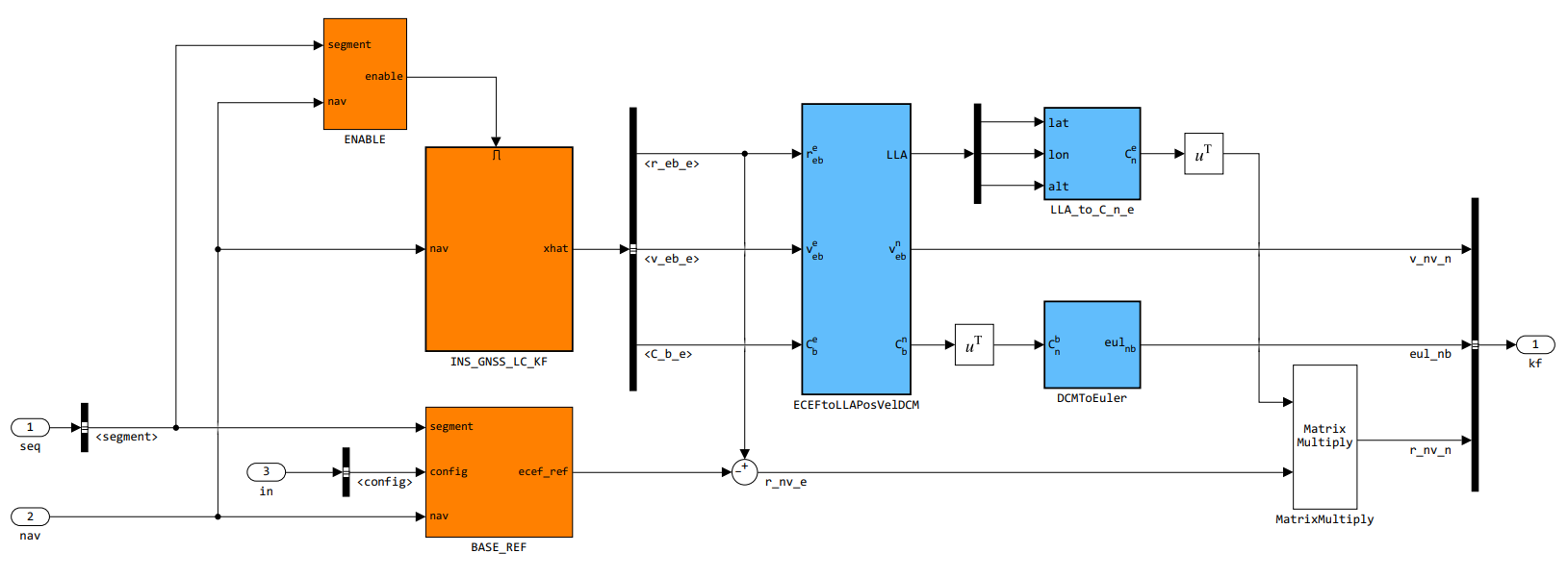
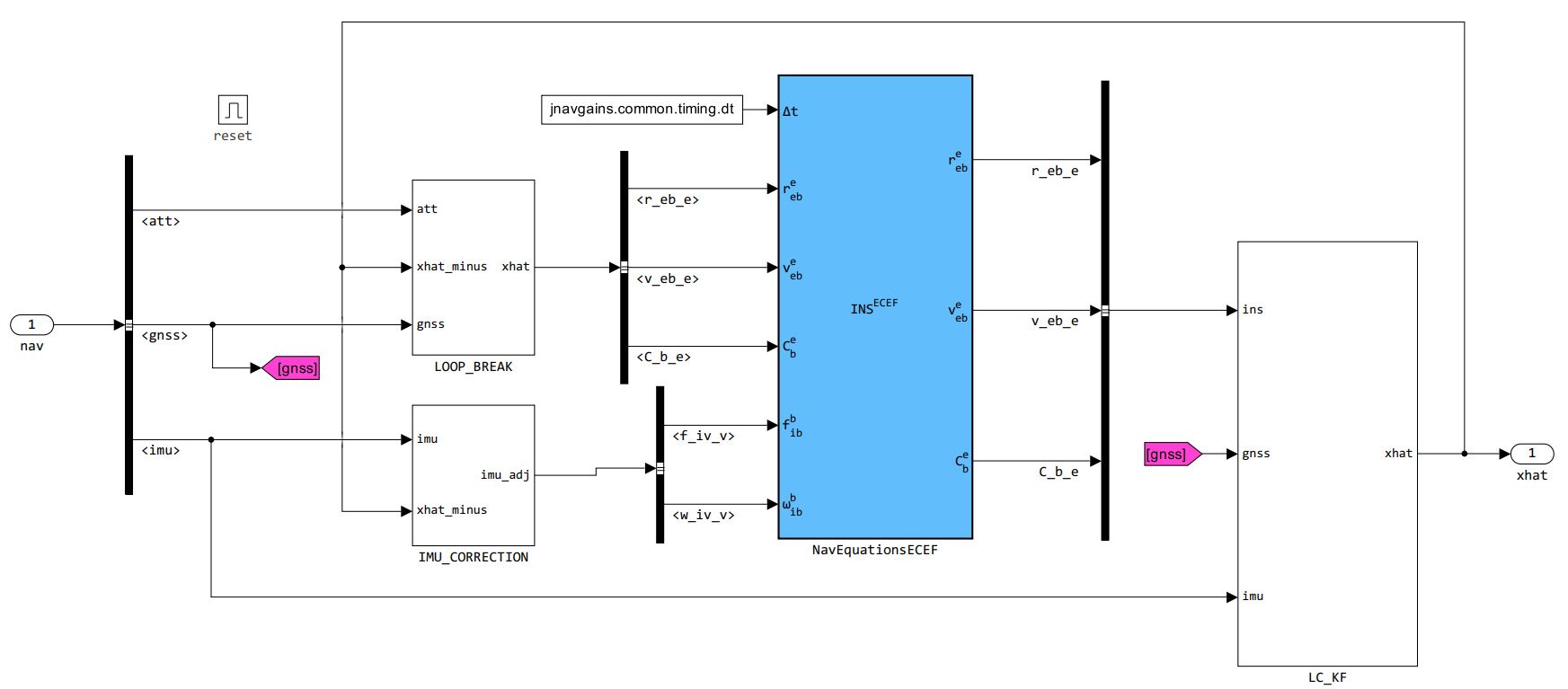
EKF Loop:
Below shows the EKF complete with its ECEF INS software and its loosely coupled KF function.
|